La computación cuántica permitirá crear potentes ordenadores, pero también robots mucho más inteligentes y creativos que los clásicos. Así lo asegura un estudio de investigadores de la Universidad Complutense de Madrid (UCM) y de Austria, que han confirmado como las herramientas cuánticas ayudan a los robots a aprender y responder mucho más rápido a los estímulos de su entorno.
La mecánica cuántica ha revolucionado el mundo de las comunicaciones y los ordenadores por la introducción de algoritmos mucho más veloces y seguros en la transferencia de información. Ahora investigadores de la Universidad Complutense de Madrid (UCM) y la Universidad de Innsbruck (Austria) publican un trabajo en la revista Physical Review X donde aseguran que sus mismas herramientas se pueden aplicar a los robots, los autómatas y demás agentes que usa la Inteligencia Artificial (IA).
Los robots cuánticos se adaptan a situaciones donde los clásicos no terminan los procesos de aprendizaje y respuesta
Por primera vez demuestran que las máquinas cuánticas pueden responder de forma óptima y más rápida a la hora de actuar frente al entorno que las rodea. En concreto, que se adaptan a situaciones donde las clásicas, más lentas, no llegan a terminar los procesos de aprendizaje y respuesta.
“En el caso de entornos muy exigentes e ‘impacientes’, el resultado es que el robot cuántico puede adaptarse y sobrevivir, mientras que el robot clásico está destinado a desfallecer”, explican G. Davide Paparo y Miguel A. Martín-Delgado, los dos investigadores de la UCM que han participado en el estudio.
Un robot cuántico puede ser más rápido y eficaz que uno clásico en entornos muy exigentes. / Ilustración adaptada de imagen de Lorenzo Natale
Su trabajo teórico se ha centrado en acelerar de forma cuántica uno de los puntos más difíciles de resolver en informática: el aprendizaje robótico (machine learning, en inglés), que se utiliza para elaborar modelos y predicciones muy precisas. Se aplican, por ejemplo, para conocer la evolución del clima, las enfermedades o en el desarrollo de los motores de búsqueda por internet.
Robots cuánticos más creativos
“Construir un modelo es realmente un acto creativo, pero los ordenadores clásicos no son buenos en esto –dice Martin-Delgado–. Ahí es donde entra en juego la computación cuántica. Las ganancias que aporta no son solo cuantitativas en cuanto a mayor velocidad, también cualitativas, al adaptarse mejor a entornos donde el agente clásico no sobrevive. Es decir, los robots cuánticos son más creativos”.
Los autores valoran así el alcance de su estudio: “Significa un paso adelante hacia el objetivo más ambicioso de la inteligencia artificial: la creación de un robot que tenga inteligencia y creatividad, y que no esté diseñado para tareas específicas”.
Este trabajo se enmarca dentro de una disciplina nueva, la denominada ‘inteligencia artificial cuántica’ (Quantum AI), un ámbito en el que la compañía Google ha comenzado a invertir millones de dólares mediante la creación de un laboratorio especializado en colaboración con la NASA.
El mercado de la robótica y las perspectivas
futuras
Las ventas anuales para robots industriales han ido creciendo en Estados
Unidos a razón del 25% de acuerdo a estadísticas del año 1981 a 1992. El
incremento de ésta tasa se debe a factores muy diversos. En primer lugar, hay
más personas en la in
dustria que tienen conocimiento de la tecnología y de su
potencial para sus aplicaciones de utilidad. En segundo lugar, la tecnología de
la robótica mejorará en los próximos años de manera que hará a los robots más
amistosos con el usuario, más fáciles de interconectar con otro hardware y más
sencillos de instalar.
En tercer lugar, que crece el mercado, son previsibles economías de
escala en la producción de robots para proporcionar una reducción en el precio
unitario, lo que haría los proyectos de aplicaciones de robots más fáciles de
justificar. En cuarto lugar se espera que el mercado de la robótica sufra una
expansión más allá de las grandes empresas, que ha sido el cliente tradicional
para ésta tecnología, y llegue a las empresas de tamaño mediano, pequeño y por
que no; las microempresas. Estas circunstancias darán un notable incremento en
las bases de clientes para los robots.
La robótica es una tecnología con futuro y también para el futuro. Si
continúan las tendencias actuales, y si algunos de los estudios de investigación
en el laboratorio actualmente en curso se convierten finalmente en una
tecnología factible, los robots del futuro serán unidades móviles con uno o más
brazos, capacidades de sensores múltiples y con la misma potencia de
procesamiento de datos y de cálculo que las grandes computadoras actuales.
Serán capaces de responder a ordenes dadas con voz humana. Así mismo serán
capaces de recibir instrucciones generales y traducirlas, con el uso de la
inteligencia artificial en un conjunto específico de acciones requeridas para
llevarlas a cabo. Podrán ver, oír, palpar, aplicar una fuerza media con
precisión a un objeto y desplazarse por sus propios medios.
En resumen, los futuros robots tendrían muchos de los atributos de los
seres humanos. Es difícil pensar que los robots llegarán a sustituir a los
seres humanos en el sentido de la obra de Carel Kapek, Robots
Universales de Rossum. Por el contrario, la robótica es una tecnología que
solo puede destinarse al beneficio de la humanidad. Sin embargo, como otras
tecnologías, hay peligros potenciales implicados y deben establecerse
salvaguardas para no permitir su uso pernicioso.
El paso del presente al futuro exigirá mucho trabajo de ingeniería
mecánica, ingeniería electrónica, informática, ingeniería industrial,
tecnología de materiales, ingenierías de sistemas de fabricación y ciencias
sociales. 18. Proyecto quetzalcoatl Introducción
La Sociedad actual se encuentra inmersa en una Revolución Tecnológica,
producto de la invención del transistor semiconductor en 1951 ( fecha en la que
salió al mercado ). Este acontecimiento ha provocado cambios trascendentales
así como radicales en los ámbitos sociales, económicos, y políticos del orbe
mundial.
Ésta Revolución da origen a un gran número de ciencias multidiciplinarias;
este es el caso de la Robótica.La Robótica es una ciencia que surge
a finales de la década de los 50´s, y que a pesar de ser una ciencia
relativamente nueva, ha demostrado ser un importante motor para el avance
tecnológico en todos los ámbitos ( Industria de manufactura, ciencia, medicina,
industria espacial; etc.), lo que genera expectativas muy interesantes para un
tiempo no muy lejano.
Sin embargo es en la Industria de Manufactura donde la Robótica
encuentra un campo de aplicación muy amplio, su función es la de suplir la mano
de obra del Hombre en aquellos trabajos en los que las condiciones no son las
óptimas para este ( minas, plantas nucleares, el fondo del mar; etc.), en
trabajos muy repetitivos y en inumerables acciones de trabajo.
Debido al alto costo que representa el automatizar y robotizar un
proceso de producción, la tendencia actual en Robótica es la investigación de
microrobots y robots móviles autónomos con un cierto grado de inteligencia,
este último es el campo en el que se basa este proyecto de investigación.
Por lo anteriormente expuesto se explica la necesidad y la importancia
de que Institutos de Investigación, Centros Tecnológicos, la Industria Privada
en coordinación con las Universidades se den a la tarea de destinar recursos
tanto económicos y humanos para aliviar el rezago tecnológico que el país
padece.
Cabe hacer mención que este proyecto fue financiado por el Centro de
Investigación y Estudios Avanzados del IPN (CINVESTAV). ¿ QUE ES UN ROBOT ?
Un robot puede ser visto en diferentes niveles de sofisticación, depende
de la perspectiva con que se mire. Un técnico en mantenimiento puede ver un
robot como una colección de componentes mecánicos y electrónicos; por su parte
un ingeniero en sistemas puede pensar que un robot es una colección de
subsistemas interrelacionados; un programador en cambio, simplemente lo ve como
una máquina ha ser programada; por otro lado para un ingeniero de manufactura
es una máquina capaz de realizar un tarea específica. En contraste, un
científico puede pensar que un robot es un mecanismo el cuál él construye para
probar una hipótesis.
Un robot puede ser descompuesto en un conjunto de subsistemas
funcionales: procesos, planeación, control, sensores, sistemas eléctricos, y
sistemas mecánicos. El subsistema de Software es una parte implícita de los
subsistemas de sensores, planeación, y control; que integra todos los
subsistemas como un todo.
En la actualidad, muchas de las funciones llevadas acabo por los
subsistemas son realizadas manualmente, o de una forma off-line, pero en un
futuro las investigaciones en estos campos permitirán la automatización de
dichas tareas.
El Subsistema de Procesos incluye las tareas que lleva acabo el robot,
el medio ambiente en el cual es colocado, y la interacción entre este y el
robot. Este es el dominio de la ingeniería aplicada. Antes de que un robot
pueda realizar una tarea, ésta debe ser buscada dentro de una secuencia de
pasos que el robot pueda ejecutar. La tarea de búsqueda es llevada acabo por el
Subsistema de Planeación, el cuál incluye los modelos de procesos inteligentes,
percepción y planeación. En el modelo de procesos, los datos que se obtienen de
una variedad de sensores son fusionados (Integración Sensorial) con modelos
matemáticos de las tareas para formar un modelo del mundo. Al usar este modelo
de mundo, el proceso de percepción selecciona la estrategia para ejecutar la
tarea. Estas estrategias son convertidas dentro de los programas de control de
el robot durante el proceso de planeación.
Estos programas son ejecutados por el Subsistema de Control; en este
subsistema, los comandos de alto nivel son convertidos en referencias para
actuadores físicos, los valores retroalimentados son comparados contra estas
referencias, y los algoritmos de control estabilizan el movimiento de los
elementos físicos.
Al realizar ésta tarea los mecanismos son modelados, el proceso es
modelado, la ganancia de lazo cerrado puede ser adaptada, y los valores medidos
son utilizados para actualizar los procesos y los modelos de los mecanismos.
Desde el subsistema de control se alimentan las referencias de los
actuadores al Subsistema Eléctrico el cuál incluye todos los controles
eléctricos de los actuadores. Los actuadores hidráulicos y neumáticos son
usualmente manejados por electroválvulas controladas. También, este subsistema
contiene computadoras, interfaces, y fuentes de alimentación. Los actuadores
manejan los mecanismos en el Subsistema Mecánico para operar en el medio
ambiente, esto es, realizar una tarea determinada. Los parámetros dentro del
robot y del medio ambiente son monitoreados por el Subsistema de Sensores; ésta
información sensórica se utiliza como retroalimentación en las ganancias de
lazo cerrado para detectar potencialmente las situaciones peligrosas, para
verificar que las tareas se realizan correctamente, y para construir un modelo
del mundo.
VEHÍCULOS
La mayoría de los robots usan ya sea ruedas o extremidades para moverse.
Estas son usualmente montadas sobre una base para formar un vehículo, también
se montan sobre ésta base, el equipo y los accesorios que realizan otras
funciones. Los robots más versátiles son los robots "serpentina";
llamados así por que su locomoción se inspira en el movimiento de las
serpientes; se pueden utilizar en terrenos subterráneos y de espacios
reducidos, donde el hombre no tiene acceso y el medio ambiente no es el más
propicio, como en las minas, túneles y ductos.
Algunos robots móviles tienen brazos manipuladores, esto es debido a sus
funciones, y por otro lado la problemática de carecer de brazos idóneos; que
tienen que ser pequeños, fuertes, eficientes y baratos. Un problema al cuál se
enfrentan los diseñadores de robots, es la generación y almacenado de la
energía; los cordones restringen el movimiento pero proveen energía ilimitada.
En contraste los robots con libre movimiento son limitados por su
cantidad de energía que puedan almacenar y requieren de comunicación
inalámbrica.
En la medida que los robots sean más sofisticados, serán utilizados en
un mayor número de aplicaciones, muchas de las cuáles requieren movilidad. En
algunas aplicaciones industriales, la necesidad de movilidad es eliminada por
la construcción de células de trabajo alrededor del robot, de ésta manera un
robot fijo puede dar servicio a varias máquinas. En estos sistemas de
manufactura flexible (SMF) las partes son llevadas de una célula de trabajo a
otra por vehículos autómatas. En ocasiones para limitar el movimiento del robot
se monta sobre rieles para así llegar hasta las células de trabajo con menos
complicaciones.
La movilidad es usualmente llevada acabo mediante ruedas, rieles ó
extremidades. Los robots con extremidades pueden andar en terrenos más rugosos
que los robot con rodado, pero el problema de control es más complejo. Los
robots pueden alcanzar movilidad volando. Algunos se deslizan ligeramente sobre
al tierra sobre conductos de aire; otros usan levitación magnética, para lo que
se requieren superficies especialmente preparadas.
Los robots diseñados para usos en el espacio exterior no son afectados
por la gravedad; se elimina el problema de levitación, pero se incrementa el
problema del control y la estabilidad.
VEHÍCULOS DE RODADO
Mientras la gente y la mayoría de los animales se desplaza sobre
extremidades, la mayoría de las máquinas móviles utilizan ruedas. La ruedas son
más simples de controlar, tienen pocos problemas de estabilidad, usan menos
energía por unidad de distancia de movimiento y son más veloces que las
extremidades. La estabilidad se mantiene al fijar el centro de gravedad de el
vehículo en triangulación de los puntos que tocan tierra. Sin embargo, las
ruedas solamente pueden utilizarse sobre terrenos relativamente lisos y
sólidos. Si se quiere utilizar el robot en terrenos rugosos las ruedas tienen
que tener un tamaño mayor que los obstáculos encontrados.
El arreglo más familiar para las ruedas de un vehículo es el utilizado
por los automóviles. Cuatro ruedas son colocadas en las esquinas de un
rectángulo. La mayoría de estos vehículos tiene maniobrabilidad limitada debido
a que tienen que avanzar para poder dar vuelta. También se requiere de un
sistema de suspensión para asegurar que las ruedas estén en contacto con la
superficie durante todo el tiempo. Cuando el robot se desplaza en línea recta
las cuatro ruedas tienen que girar a la misma velocidad, en cambio al momento
de dar vuelta las ruedas interiores giran más lento que las ruedas exteriores.
En un robot móvil, estos requerimientos son alcanzados por un buen
diseño mecánico y mediante el control de la velocidad de las ruedas de
dirección independiente. Sin embargo las imprecisiones que se presentan para
alcanzar una trayectoria definida son causadas por factores mecánicos,
deslizamiento de las ruedas, dobleces en los ejes de dirección, y
desalineamiento de las ruedas. ¿EN QUE CONSISTE EL PROYECTO QUETZALCÓATL?
OBJETIVOS
Construir el prototipo de un
Robot Móvil Autónomo para propósitos didácticos y/o para prueba y
verificación de algoritmos de control. Y dejar, con este proyecto de investigación,
las bases para próximas mejoras en la optimización del prototipo.
Crear nuevos investigadores
que cuenten con experiencia y habilidad en el desarrollo de
investigaciones y realización de proyectos de este tipo.
Motivar y crear bases para
el desarrollo de más proyectos didácticos y/o aplicados a la industria.
Crear vínculos con otras
instituciones de enseñanza superior en el Estado con la Universidad de
Guadalajara.
METODOLOGÍA DEL DISEÑO
El proyecto consta básicamente de cuatro etapas; Etapa de Investigación, Etapa
de Síntesis Informativa, Etapa de Diseño y Construcción, Etapa de pruebas,
calibración y control. A).- Etapa de Investigación.
a) Adquisición de Bibliografía.
b) Búsqueda de las fuentes de información específicas de aquellos
elementos que constituyen el prototipo.
c) Investigación de las variables que intervienen en el proceso de
control del prototipo.
d) Adquisición y estudio del software para el desarrollo e
implementación de los algoritmos de control. B).- Etapa de Síntesis de la
Información.
Ésta etapa se basa en la etapa anterior y da como resultado una serie de
elementos que son necesarios para el desarrollo de las siguientes etapas de el
proyecto. C).- Etapa de Diseño y Construcción.
En ésta etapa se aplica toda la información que se recaba y consulta, y que el
diseño del prototipo requiere para el cumplimiento de los objetivos planteados
anteriormente. En base a estos lineamientos se construyen las piezas que
conforman el prototipo, con el material y componentes adecuados. D).- Etapa de
Pruebas, Calibración y Control.
Ésta es la etapa final, se adoptan las medidas necesarias para alcanzar los objetivos
planteados. Se aplican los algoritmos de control y se prueban hasta conseguir
el resultado esperado. DESCRIPCIÓN DEL PROYECTO
El sistema propuesto consta de :
Un Robot Móvil Autónomo.
Se encuentra formado por 2 módulos unidos entre sí mediante una unión
mecánica, la locomoción del prototipo se realiza por medio de dos ruedas en
cada eslabón, en donde cada una de las que son parte de el primer eslabón
cuenta con un actuador ( motorreductor de DC ).
Los servosistemas se componen de un Driver tipo Chopper con control en
lazo cerrado de velocidad, para cada actuador en forma independiente.
La alimentación del Robot se realiza mediante módulos de baterías de 12
V y los voltajes se adaptan por medio de convertidores DC-DC.
La información del entorno donde se mueve el Robot se recaba mediante
sensores ultrasónicos, los cuales cuentan con una tarjeta de interfaz, la cual
pasa dicha información al Cerebro del Robot.
Debido a la complejidad del proyecto, este se descompone en un conjunto
de subsistemas que son: - Subsistema Mecánico.
Este subsistema incluye los eslabones, las uniones mecánicas y el módulo que
contiene a todo el sistema que permite que las ruedas giren ( ruedas, ejes,
coples, baleros). - Subsistema Eléctrico
Este subsistema incluye los servosistemas ( Drivers ), las interfaces entre los
sensores, los drivers y la computadora, así como las fuentes de alimentación.
-Subsistemas de Sensores
Ésta incluye los sensores de velocidad de tipo incremental, y sensores
ultrasónicos para la exploración del medio ambiente. - Subsistemas de Procesos,
Planeación y Control
En este subsistema se encuentran el control de los motores y todas las tareas
que realiza el prototipo interiormente y exteriormente al interactuar con el
medio ambiente
No obstante las limitaciones de las máquinas robóticas
actuales, el concepto popular de un robot es que tiene apariencia humana y que actúa
como un ser humano. Este concepto humanoide ha sido inspirado y estimulado por
varias narraciones de ciencia ficción.Una de las primeras obras importantes a
este concepto fue una novela de Mary Shelley, publicada en Inglaterra en 1817.
con el título de Frankenstein,la narración se refiere a los esfuerzos de un
científico, el doctor Frankenstein,para crear un monstruo humanoide que luego
produjo estragos en la comunidad local. La narración ha sido popularizada en
varias versiones a través de los años, plasmados en varias producciones
cinematográficas. La imagen en la pantalla cinematográfica del monstruo de
Frankenstein salió fuera de los planes de su bien intencionada creadora para
producir una impresión duradera en las mentes de millones de personas. Esta
impresión ha dado lugar a que los robots se asimilen a imágenes similares de
ciencia y tecnología concierto peligro de locura homicida. Una obra
checoslovaca publicada en el año de 1917 por Carel Capek,denominada ³Rossum´s
Universal Robots´, da lugar al término robot. La palabra checa ³robota´
significa servidumbre o trabajador forzado, y cuando se tradujo al inglés se
convirtió en el término robot. Dicha narración se refiere a un brillante científico
llamado Rossum y su hijo, quienes desarrollan una sustancia química que es
similar al protoplasma. Utilizan esta sustancia para fabricar robots, y sus
planes consisten en que los robots sirven a la clase humana deforma obediente y
para realizar todos los trabajos físicos. Rossum prosigue realizando mejoras en
el diseño de los robots, eliminando órganos y otros elementos innecesarios, y
finalmente desarrolla un ser ³perfecto´. El argumento experimenta un giro
desagradable cuando los robots perfectos comienzan a no cumplir con su papel de
servidores y se revelan contra sus dueños,destruyendo toda la vida humana.Entre
los escritores de ciencia ficción, Isaac Asimov ha contribuido con varias
narraciones relativas a los robots, comenzando en 1939, y a él se le atribuye
la definición del término robótica. La imagen de un robot que aparecen su obra
es el de una máquina bien diseñada y con una seguridad garantizada que actúa de
acuerdo con tres principios. Estos principios fueron denominados por Asimov las
tres leyes de la robótica, y son:1. Un robot no puede actuar contra un ser
humano o, mediante lainacción, permitir que un ser humano sufra daños.2. Un
robot debe obedecer las órdenes dadas por los seres humanos,salvo que estén en
conflicto con la primera ley.3. Un robot debe proteger su propia existencia a
no ser que esté enconflicto con las dos primeras leyes. Varias películas
cinematográficas y de televisión han añadido al saber popular de la robótica
algunos robots que actúan de servidores amistosos ycompañeros de aventuras en
diferentes maneras. La película titulada ³The daythe Earth Stood Still´ de
1951, tenía como argumento una misión desde unplaneta lejano enviado de la
tierra en un platillo volante para intentar establecer las bases para la paz
entre las naciones del universo.
Un robot es una entidad virtual o mecánica artificial. En la
práctica, esto es por lo general un sistema electromecánico que, por su
apariencia o sus movimientos, ofrece la sensación de tener un propósito propio.
La independencia creada en sus movimientos hace que sus acciones sean la razón
de un estudio razonable y profundo en el área de la ciencia y tecnología. La
palabra robot puede referirse tanto a mecanismos físicos como a sistemas
virtuales de software, aunque suele aludirse a los segundos con el término de
bots.
No hay un consenso sobre qué máquinas pueden ser
consideradas robots, pero sí existe un acuerdo general entre los expertos y el
público sobre que los robots tienden a hacer parte o todo lo que sigue:
moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y
mostrar un comportamiento inteligente, especialmente si ese comportamiento
imita al de los humanos o a otros animales. Actualmente podría considerarse que
un robot es una computadora con la capacidad y el propósito de movimiento que
en general es capaz de desarrollar múltiples tareas de manera flexible según su
programación; así que podría diferenciarse de algún electrodoméstico
específico.
Aunque las historias sobre ayudantes y acompañantes
artificiales, así como los intentos de crearlos, tienen una larga historia, las
máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot
programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para
levantar piezas calientes de metal de una máquina de tinte y colocarlas.
Por lo general, la gente reacciona de forma positiva ante
los robots con los que se encuentra. Los robots domésticos para la limpieza y
mantenimiento del hogar son cada vez más comunes en los hogares. No obstante,
existe una cierta ansiedad sobre el impacto económico de la automatización y la
amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato
a menudo perverso y malvado de robots presentes en obras de la cultura popular.
Comparados con sus colegas de ficción, los robots reales siguen siendo
limitados.
Historia
Los primeros autómatas
En el siglo IV antes de Cristo, el matemático griego
Arquitas de Tarento construyó un ave mecánica que funcionaba con vapor y al que
llamó «La paloma». También el ingeniero Herón de Alejandría (10-70 d. C.) creó
numerosos dispositivos automáticos que los usuarios podían modificar, y
describió máquinas accionadas por presión de aire, vapor y agua.6 Por su parte,
el estudioso chino Su Sung levantó una torre de reloj en 1088 con figuras
mecánicas que daban las campanadas de las horas.
Al Jazarí (1136–1206), un inventor musulmán de la dinastía
Artuqid, diseñó y construyó una serie de máquinas automatizadas, entre los que
había útiles de cocina, autómatas musicales que funcionaban con agua, y en 1206
los primeros robots humanoides programables. Las máquinas tenían el aspecto de
cuatro músicos a bordo de un bote en un lago, entreteniendo a los invitados en
las fiestas reales. Su mecanismo tenía un tambor programable con clavijas que
chocaban con pequeñas palancas que accionaban instrumentos de percusión. Podían
cambiarse los ritmos y patrones que tocaba el tamborilero moviendo las
clavijas.
Desarrollo moderno
El artesano japonés Hisashige Tanaka (1799–1881), conocido
como el «Edison japonés», creó una serie de juguetes mecánicos extremadamente
complejos, algunos de los cuales servían té, disparaban flechas retiradas de un
carcaj e incluso trazaban un kanji (caracteres utilizados en la escritura
japonesa).
Por otra parte, desde la generalización del uso de la
tecnología en procesos de producción con la Revolución Industrial se intentó la
construcción de dispositivos automáticos que ayudasen o sustituyesen al hombre.
Entre ellos destacaron los Jaquemarts, muñecos de dos o más posiciones que
golpean campanas accionados por mecanismos de relojería china y japonesa.
Robots equipados con una sola rueda fueron utilizados para
llevar a cabo investigaciones sobre conducta, navegación y planeo de ruta.
Cuando estuvieron listos para intentar nuevamente con los robots caminantes,
comenzaron con pequeños hexápodos y otros tipos de robots de múltiples patas.
Estos robots imitaban insectos y artrópodos en funciones y forma. Como se ha
hecho notar anteriormente, la tendencia se dirige hacia ese tipo de cuerpos que
ofrecen gran flexibilidad y han probado adaptabilidad a cualquier ambiente. Con
más de 4 piernas, estos robots son estáticamente estables lo que hace que el
trabajar con ellos sea más sencillo. Sólo recientemente se han hecho progresos
hacia los robots con locomoción bípeda.
En el sentido común de un autómata, el mayor robot en el
mundo tendría que ser el Maeslantkering, una barrera para tormentas del Plan
Delta en los Países Bajos construida en los años 1990, la cual se cierra
automáticamente cuando es necesario. Sin embargo, esta estructura no satisface
los requerimientos de movilidad o generalidad.
En 2002 Honda y Sony, comenzaron a vender comercialmente
robots humanoides como «mascotas». Los robots con forma de perro o de serpiente
se encuentran, sin embargo, en una fase de producción muy amplia, el ejemplo
más notorio ha sido Aibo de Sony.
La robótica en la actualidad
En la actualidad, los robots comerciales e industriales son
ampliamente utilizados, y realizan tareas de forma más exacta o más barata que
los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o
tediosos para los humanos. Los robots son muy utilizados en plantas de
manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y
en el espacio, cirugía, armamento, investigación en laboratorios y en la producción
en masa de bienes industriales o de consumo.
Otras aplicaciones incluyen la limpieza de residuos tóxicos,
minería, búsqueda y rescate de personas y localización de minas terrestres.
Expo 2005, Nagakute (Aichi).
Existe una gran esperanza, especialmente en Japón, de que el
cuidado del hogar para la población de edad avanzada pueda ser desempeñado por
robots.
Los robots parecen estar abaratándose y reduciendo su
tamaño, una tendencia relacionada con la miniaturización de los componentes
electrónicos que se utilizan para controlarlos. Además, muchos robots son
diseñados en simuladores mucho antes de construirse y de que interactúen con
ambientes físicos reales. Un buen ejemplo de esto es el equipo Spiritual
Machine, un equipo de 5 robots desarrollado totalmente en un ambiente virtual
para jugar al fútbol en la liga mundial de la F.I.R.A.
Además
de los campos mencionados, hay modelos trabajando en el sector educativo,
servicios (por ejemplo, en lugar de recepcionistas humanos o vigilancia) y tareas
de búsqueda.
El robot estadounidense Atlas (en desarrollo desde 2013) está diseñado para una variedad de tareas de búsqueda y rescate.
A pesar de su nombre, las redes neuronales no tienen un concepto demasiado complicado detrás de ellas. El nombre, como podéis imaginar, viene de la idea de imitar el funcionamiento de las redes neuronales de los organismos vivos: un conjunto de neuronas conectadas entre sí y que trabajan en conjunto, sin que haya una tarea concreta para cada una. Con la experiencia, las neuronas van creando y reforzando ciertas conexiones para "aprender" algo que se queda fijo en el tejido.
Ahora bien, por bonito que suene esto, el enfoque biológico no ha sido especialmente útil: las redes neuronales han ido moviéndose para tener un foco en matemáticas y estadística. Se basan en una idea sencilla: dados unos parámetros hay una forma de combinarlos para predecir un cierto resultado. Por ejemplo, sabiendo los píxeles de una imagen habrá una forma de saber qué número hay escrito, o conociendo la carga de servidores de un Centro de Procesamiento de Datos (CPD), su temperatura y demás existirá una manera de saber cuánto van a consumir,como hacía Google. El problema, claro está, es que no sabemos cómo combinarlos.
Las redes neuronales permiten buscar la combinación de parámetros que mejor se ajusta a un determinado problema.
Las redes neuronales son un modelo para encontrar esa combinación de parámetros y aplicarla al mismo tiempo. En el lenguaje propio, encontrar la combinación que mejor se ajusta es "entrenar" la red neuronal. Una red ya entrenada se puede usar luego para hacer predicciones o clasificaciones, es decir, para "aplicar" la combinación.
Para entender bien cómo funciona esta red vamos a ir con un ejemplo. Supongamos que sois alumnos de una clase en la que el profesor no ha dicho exactamente cómo va a poner las notas. Para empezar, supongamos que sólo habéis hecho dos exámenes y tenéis la nota de cada uno de ellos y la final.
Como decía antes, esto es el ejemplo simple. Quizás queramos complicarlo más, poniendo más exámenes (más nodos de entrada) o queriendo sacar más resultados, como pueda ser un perceptrón cuya salida sea uno si el alumno tiene matrícula de honor.
Multiplicando la potencia: redes multicapa
El ejemplo que he puesto antes funciona pero no se puede decir que sea demasiado potente. Pero quizás es que es demasiado simple. ¿No decíamos al principio que las redes neuronales eran un grupo de neuronas conectadas entre sí? ¿Cómo se logra esa "conexión" en las redes neuronales?
El concepto que nos falta aquí es el de las capas. Y para explicarlo vamos a seguir con nuestro ejemplo del profesor que pone notas sin decir cómo, añadiendo un trabajo que había que entregar.
Resulta que se da una situación curiosa. Hay dos alumnos que tienen la misma nota en los exámenes, dos dieces, pero uno tiene un 7 en el trabajo y otro un 4. El del 7 ha aprobado el curso, pero el del 4 no. Hay un alumno que tiene un 10 en el trabajo y 4.99 en los dos exámenes y que está suspenso.
Podemos intentar entrenar una red neuronal como la de antes todo lo que queramos en esta situación que no va a funcionar bien. Es posible que funcione en muchos casos, pero no va a ser perfecta. Y es que parece que la nota del trabajo no influye salvo que lo suspendas, en cuyo caso estás suspenso directamente. Es un filtro, un uno o un cero que tenemos que sacar en la red neuronal antes de poder dar el resultado de aprobado o suspendido en el curso... Ya deberíais ver por dónde van los tiros.
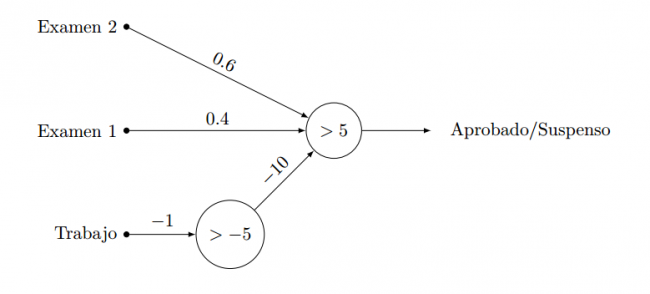
Efectivamente: necesitamos más capas. Necesitamos un perceptrón intermedio que nos diga si el trabajo está aprobado o no, y contar eso en el perceptrón de salida. Una posiblidad sería una red como la siguiente:
El primer perceptrón mira si la nota del trabajo multiplicada por menos uno es mayor que menos cinco (o, lo que es lo mismo, si la nota es menor que cinco). Si lo es, entonces su salida es uno. Al multiplicarla por menos diez en la entrada del segundo perceptrón, forzará siempre un suspenso. Si el trabajo está aprobado, la salida del primer perceptrón será 0 y no afectará a la media de los exámenes.
¿Qué hemos logrado con esto? O, más generalmente, ¿para qué nos sirven las capas? Lo que hemos logrado ha sido añadir información que no estaba antes. Cogemos los datos de entrada, los exploramos y sacamos las características que mejor nos ayuden a entender qué está pasando.
Lo más interesante de las capas es algo que aquí no hemos visto. En el ejemplo he puesto otra capa muy burdamente, pero lo que se suele hacer es poner varias con varios nodos, cada uno conectado a todas las entradas anteriores. Lo bueno viene cuando, durante el proceso de aprendizaje, cada capa"aprende" a encontrar y detectar las características que mejor ayudan a clasificar los datos. En nuestro ejemplo, durante el ajuste la primera capa aprendería que los alumnos con el trabajo suspenso suspenden el curso. Si cogiésemos una red para detectar números escritos a mano, puede que las capas ocultas aprendiesen a detectar trazos rectos o curvados que sirvan para decidir si estamos ante un uno o un ocho, por ejemplo.
Más allá de perceptrones: sigmoides, redes profundas y redes convolucionales
Como siempre, hasta ahora nos hemos centrado en simplificaciones para entender bien los conceptos de redes neuronales. En la realidad, las cosas se complican bastante. Por ejemplo, se dejan de usar perceptrones para usar otras "neuronas" con un comportamiento más suave, usando funciones como la sigmoide. La idea es que pequeños cambios en los pesos provoquen pequeños cambios en la salida de la red, para así poder hacer más "fácil" el aprendizaje.
Las capas también se complican. Nos podemos encontrar varias capas intermedias con varias neuronas cada una, llegando a lo que llaman "redes neuronales profundas". La idea es que con más capas con más neuronas cada una se pueden mejorar las predicciones en conjuntos de datos más complicados. Este artículo, por ejemplo, explica desde un punto de vista visual y matemático cómo afectan las multiples capas y unidades al funcionamiento de la red neuronal.
El siguiente paso son redes convolucionales, que están funcionando muy bien en reconocimiento de voz y procesamiento de imágenes. En una red neuronal como las que hemos visto antes, pondríamos una neurona para cada píxel de una imagen y después pondríamos varias capas con varias neuronas, todas conectadas entre sí, para tratar de encontrar un número en una foto, por ejemplo. El problema es que no es demasiado efectivo (imaginaos todos los pesos que habría computar para una red que acepte imágenes de 1920x1080 píxeles).
La idea de las redes convolucionales es tratar de buscar características locales en pequeños grupos de entradas (en el caso de las imágenes, de píxeles), como puedan ser bordes o colores más o menos homogéneos. Es la misma idea que comentábamos cuando introducíamos las capas unos párrafos más arriba, pero con una variación: buscamos características no en toda la imagen sino sólo en pequeñas regiones. Además, buscamos siempre detectar la misma característica en todos los grupos, por lo que podemos repetir esa estructura y reducir los ajustes que tenemos que hacer.
Para llevar a cabo esta idea, ponemos un mismo grupo de neuronas por cada grupo de entradas (por ejemplo, un cuadrado de 3x3 píxeles en una imagen o una secuencia de 4 mediciones en un archivo de sonido). La idea es que todos los elementos que metamos en la capa (llamada capa de convolución) tienen los mismos pesos por cada entrada, y se reduce considerablemente el número de parámetros. Si metemos más capas, la red neuronal podrá descubrir más y más complejas características de la imagen: se puede empezar por colores o bordes orientados y acabar con capas que se activan con formas circulares o cuadradas, por poner un ejemplo.
Después de las capas de convolución se suele poner otra red neuronal "tradicional", que ahora tendrá más fácil el trabajo: no tiene que valorar cada píxel por separado sino que mira a un conjunto de características de alto nivel de la imagen. Ya no se trata de decidir si la imagen es un coche sabiendo que el píxel 1208 es amarillo y el 1209 es verde, sino quizás sabiendo que hay una forma rectangular en la imagen con dos formas circulares en la parte inferior. De nuevo, se trata de extraer la información "oculta" en la entrada para tratar de encontrar qué es lo que define esos datos.
¿Una nueva época dorada para redes neuronales?
Las redes neuronales no son una idea nueva. Datan de los años 40 y 50, cuando se empezaron a publicar los primeros conceptos. Sin embargo, nunca tuvieron un gran éxito, más que nada porque se necesita una cantidad importante de recursos de un ordenador para entrenar y ejecutar una red neuronal con buenos resultados.
En los últimos años se han conseguido grandes avances gracias a la mejora de los ordenadores y al uso de GPUs para este tipo de computaciones. Hace poco os hablábamos en Xataka de los pies de foto generado por ordenador gracias a una red neuronal de convolución (para el reconocimiento de imagen) junto con una red neuronal recurrente para formar las frases. Los investigadores de Stanfordusaron tarjetas GPU para poder entrenar y ejecutar este tipo de redes neuronales en un tiempo razonable.
Reconocimiento de números, de voz, de objetos en imágenes... las redes neuronales están empezando a resolver problemas que se le escapaban a los ordenadores.
Algo parecido montó Googlecon Street View unared neuronal convolucional que lograba una presicíon del 96% a la hora de reconocer números de calle en las imágenes que toman sus coches. Los de Mountain View están bastante enamorados de las redes neuronales, de hecho: también las usaron para mejorar
el reconocimiento de voz de Android o
paraahorrar electricidad en sus centros de datos.
Las redes neuronales parece que incluso podrían acabar dominando uno
de los juegos que se les resiste a los ordenadores: el juego de Go. En la Universidad de Edimburgo, unos investigadores han logrado usar redes convolucionales para detectar patrones en los tableros y tratar de sacar el mejor movimiento con una efectividad considerable: 90% de juegos ganados contra GNU Go y 10% contra Fuego, dos de los programas que mejor juegan a Go. Aunque pueda parecer poco, hay que tener en cuenta que ambos exploran un buen número de movimientos posibles para ver cuál da más ventaja. La red neuronal sólo mira al estado actual del tablero y emite un veredicto en muchísimo menos tiempo.
Por
supuesto, estas redestampoco son la panacea. A modo de curiosidad, unos
investigadores usaron una red neuronal paragenerar
imágenes que engañaban a otra red neuronal diseñada para reconocer objetos.
Así, lo que a nosotros nos parece una imagen aleatoria, para la red neuronal es
un bikini o un armadillo. Es parte del problema del sobre ajuste: redes que se
comportan muy bien para los datos de ejemplo o parecidos, pero que con datos
muy distintos dan resultados absurdos.
Sea
como sea, es un campo muy interesante y que prometebastantes avances a corto plazo sobre
todo en reconocimiento de imagen y de sonido. Estaremos atentos para ver qué
sorpresas nos deparan.
Historia de la Robótica
Por siglos, el ser humano ha construido máquinas que imitan
partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las
estatuas de sus dioses; los griegos construyeron estatuas que operaban con
sistemas hidráulicos, los cuales eran utilizados para fascinar a los adoradores
de los templos.
El inicio de la robótica actual puede fijarse en la
industria textil del siglo XVIII, cuando Joseph Jacquard inventa en 1801 una
máquina textil programable mediante tarjetas perforadas. Luego, la Revolución
Industrial impulsó el desarrollo de estos agentes mecánicos. Además de esto,
durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos
muy ingeniosos que tenían algunas características de robots. Jacques de
Vauncansos construyó varios músicos de tamaño humano a mediados del siglo
XVIII.En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de
hacer dibujos.
La palabra robot se utilizó por primera vez en 1920 en una
obra llamada "Los Robots Universales de Rossum", escrita por el
dramaturgo checo Karel Capek. Su trama trataba sobre un hombre que fabricó un
robot y luego este último mata al hombre. La palabra checa 'Robota' significa
servidumbre o trabajado forzado, y cuando se tradujo al inglés se convirtió en
el término robot.
Luego, Isaac Asimov comenzó en 1939 a contribuir con varias
relaciones referidas a robots y a él se le atribuye el acuñamiento del término
Robótica y con el surgen las denomidas "Tres Leyes de Robótica" que
son las siguientes:
Un robot no puede actuar contra un ser humano o, mediante la
inacción, que un ser humano sufra daños.
Un robot debe de obedecer las órdenes dadas por los seres
humanos, salvo que estén en conflictos con la primera ley.
Un robot debe proteger su propia existencia, a no ser que
esté en conflicto con las dos primeras leyes.
Son varios los factores que intervienen para que se
desarrollaran los primeros robots en la década de los 50's. La investigación en
inteligencia artificial desarrolló maneras de emular el procesamiento de
información humana con computadoras electrónicas e inventó una variedad de
mecanismos para probar sus teorías. Las primeras patentes aparecieron en 1946
con los muy primitivos robots para traslado de maquinaria de Devol. También en
ese año aparecen las primeras computadoras.En 1954, Devol diseña el primer
robot programable.
En 1960 se introdujo el primer robot "Unimate'', basada
en la transferencia de artículos.
En 1961 Un robot Unimate se instaló en la Ford Motors
Company para atender una máquina de fundición de troquel.
En 1966 Trallfa, una firma noruega, construyó e instaló un
robot de pintura por pulverización.
En 1971 El "Standford Arm'', un pequeño brazo de robot
de accionamiento eléctrico, se desarrolló en la Standford University.
En 1978 Se introdujo el robot PUMA para tareas de montaje
por Unimation, basándose en diseños obtenidos en un estudio de la General
Motors.
Actualmente, el concepto de robótica ha evolucionado hacia
los sistemas móviles autónomos, que son aquellos que son capaces de
desenvolverse por sí mismos en entornos desconocidos y parcialmente cambiantes
sin necesidad de supervisión.
En los setenta, la NASA inicio un programa de cooperación
con el Jet Propulsión Laboratory para desarrollar plataformas capaces de
explorar terrenos hostiles.
En la actualidad, la robótica se debate entre modelos
sumamente ambiciosos, como es el caso del IT, diseñado para expresar emociones,
el COG, tambien conocido como el robot de cuatro sentidos, el famoso SOUJOURNER
o el LUNAR ROVER, vehículo de turismo con control remotos, y otros mucho mas
específicos como el CYPHER, un helicóptero robot de uso militar, el guardia de
trafico japonés ANZEN TARO o los robots mascotas de Sony.
En general la historia de la robótica la podemos clasificar
en cinco generaciones :las dos primeras, ya alcanzadas en los ochenta, incluían
la gestión de tareas repetitivas con autonomía muy limitada. La tercera
generación incluiría visión artificial, en lo cual se ha avanzado mucho en los
ochenta y noventas. La cuarta incluye movilidad avanzada en exteriores e
interiores y la quinta entraría en el dominio de la inteligencia artificial en
lo cual se esta trabajando actualmente.
Él termino "inteligencia artificial" fue acuñado formalmente en 1956 durante la conferencia de Darthmounth, más para entonces ya se había estado trabajando en ello durante cinco años en los cuales se había propuesto muchas definiciones distintas que en ningún caso habían logrado ser aceptadas totalmente por la comunidad investigadora. La AI es una de las disciplinas más nuevas que junto con la genética moderna es el campo en que la mayoría de los científicos " más les gustaría trabajar".
Una de las grandes razones por la cuales se realiza el estudio de la IA es él poder aprender más acerca de nosotros mismos y a diferencia de la psicología y de la filosofía que también centran su estudio de la inteligencia, IA y sus esfuerzos por comprender este fenómeno están encaminados tanto a la construcción de entidades de inteligentes como su comprensión.
El estudio de la inteligencia es una de las disciplinas más antiguas, por más de 2000 años los filósofos no han escatimado esfuerzos por comprender como se ve, recuerda y razona junto con la forma en que estas actividades deberían realizarse. Según John Mc Carthy la inteligencia es la "capacidad que tiene el ser humano de adaptarse eficazmente al cambio de circunstancias mediante el uso de información sobre esos cambios", pero esta definición resulta muy amplia ya que de acuerdo con esta, el sistema inmunológico del cuerpo humanó resultaría inteligente ya que también mediante el uso de información este logra adaptarse al cambio. Otra interesante manera de ilustrar la inteligencia seria recurrir a la teoría societal de la mente de Marvin Minsky donde cada mente humana es el resultado del accionar de un comité de mentes de menor poder que conversan entre sí y combinan sus respectivas habilidades con el fin de resolver problemas.
La llegada de las computadoras a principios de los 50, permitió el abordaje sin especulación de estas facultades mentales mediante una autentica disciplina teórica experimental. Es a partir de esto que se encontró que la IA constituye algo mucho más complejo de lo que se pudo llegar a imaginar en principio ya que las ideas modernas que constituyen esta disciplina se caracterizan por su gran riqueza, sutileza e interés; en la actualidad la IA abarca una enorme cantidad de subcampos que van desde áreas de propósito general hasta tareas especificas.
Una de las definiciones que se han dado para describir la IA la sitúa dentro de una disciplina que tiene que ver con las ciencias de la computación que corresponden al esfuerzo por parte de gran cantidad de científicos que durante los últimos treinta años han realizado con el fin de dotar a las computadoras de inteligencia, a partir de esta definición encontramos que una de las técnicas de IA es aquella que se utiliza con el fin de lograr que un determinado programa se comporte de forma inteligente sin pretender tener en cuenta la " forma de razonamiento "empleada para lograr ese comportamiento.
Luego, aquí surge un dilema, ya que según esto cualquier problema resoluble por un computador, sin complicaciones y también como un ser humano podría encuadrarse en el campo de la inteligencia artificial acudiendo solamente a la aplicación de reglas consecutivas al pie de la letra o lo que encontramos con el nombre de Algoritmos dentro del lenguaje de IA; este termino fue acuñado en honor al matemático árabe AL-KWARIZMI que copiló una serie de estos para ser aplicados a diferentes problemas algebraicos.
Cuando se aplican algoritmos a la solución de los problemas aunque no se está actuando inteligentemente si esta siendo eficaz pero los problemas realmente complicados a los que se enfrenta el ser humano son aquellos en los cuales no existe algoritmo conocido así que surgen de reglas que tratan de orientarnos hacia las soluciones llamadas Heurísticas en las cuales nunca nada nos garantiza que la aplicación de una de estas reglas nos acerque a la solución como ocurre con los anteriores.
A partir de estos datos; Farid Fleifel Tapia describe a la IA como: "la rama de laciencia de la computación que estudia la resolución de problemas no algorítmicos mediante el uso de cualquier técnica de computación disponible, sin tener en cuenta la forma de razonamiento subyacente a los métodos que se apliquen para lograr esa resolución.
Para completar esa definición, algunas definiciones no tan formales emitidas por diferentes investigadores de la IA que consideran otros puntos de vista son:
La IA es el arte de crear maquinas con capacidad de realizar funciones que realizadas por personas requieren de inteligencia. ( Kurzweil, 1990)
La IA es el estudio de cómo lograr que las computadoras realicen tareas que, por el momento, los humanos hacen mejor. (Rich, Knight, 1991).
La IA es la rama de la ciencia de la computación que se ocupa de la automatización de la conducta inteligente. (Lugar y Stubblefied, 1993).
La IA es el campo de estudio que se enfoca a la explicación y emulación de la conducta inteligente en función de procesos computacionales. (Schalkoff, 1990).
En la IA se puede observar dos enfoques diferentes:
La IA concebida como el intento por desarrollar una tecnología capaz de proveer al ordenador capacidades de razonamiento similares a los de la inteligencia humana.
La IA en su concepción como investigación relativa a los mecanismos de la inteligencia humana que se emplean en la simulación de validación de teorías.
El primer enfoque se centra en la utilidad y no en el método como veíamos anteriormente con los algoritmos, los temas claves de este enfoque son la representación y gestión de conocimiento, sus autores más representativos son McCrrthy y Minsky.
John McCarthy
En el segundo enfoque encontramos que este se orienta a la creación de un sistema artificial capaz de realizar procesos cognitivos humanos haciendo importante ya no la utilidad como el método, los aspectos fundamentales de este enfoque se refieren al aprendizaje y adaptabiliada y sus autores son Newell y Simon de la Carnegie Mellon University.
La IA al tratar de construir maquinas que se comporten aparentemente como seres humanos han dado lugar al surgimiento de dos bloques enfrentados: el enfoque simbólico o top-down, conocido como la IA clásica y el enfoque subsimbolico llamado a veces conexionista.
Los simbólicos simulan directamente las características inteligentes que se pretenden conseguir o imitar y lo mejor que también se tiene a la mano es el hombre; para los constructores de los sistemas expertos resulta fundamental la representación del conocimiento humano donde gracias a estos avances se han encontrado dos tipos de conocimiento: conocimiento acerca del problema particular¨ y ¨conocimiento a cerca de cómo obtener mas conocimiento a partir del que ya tenemos¨. El ejemplo más representativo de esta corriente es el proyecto de Cyc de Douglas B. Lenat sobre un sistema que posee en su memoria millones de hechos interconectados.
Dentro de la otra corriente: la subsimbolica; sus esfuerzos se orientan a la simulación de los elementos de mas bajo nivel dentro de los procesos inteligentes con la esperanza de que estos al combinarse permitan que espontáneamente surja el comportamiento inteligente. Los ejemplos mas claros que trabajan con este tipo de orientación son las redes neuronales y los algoritmos genéticos donde estos sistemas trabajan bajo la autonomía, el aprendizaje y la adaptación, conceptos fuertemente relacionados.
Uno de los grandes seguidores de la IA; Marvin Minsky, ha dado una clasificación para los lenguajes de programación que se utilizan en esta disciplina:
Marvin Minsky
¨Haga ahora¨: Donde el programador surte de instrucciones a la maquina para realizar una tarea determinada donde todo queda especificado excepto quizás él numero de repeticiones.
¨Haga siempre que¨: Aquí se permite escribir un programa que le sirva a la computadora para resolver aquello problemas que el programador no sabe resolver pero conoce que tipo de soluciones se pueden intentar.
"De constreñimiento": se escriben programas que definen estructuras y estados que se condicionan y limitan recíprocamente.
Pero Minsky, admite que aún será necesario desarrollar dos tipos de lenguajes más para obtener una IA comparable a la inteligencia humana; y estos podrían ser.
"Haga algo que tenga sentido¨: Donde se permite al programa aprender del pasado y en una nueva situación aplicar sus enseñanzas.
"Mejórense a sí mismo": Allí se podrá permitir escribir programas que tengan en adelante la capacidad de escribir programas mejores que ellos mismos.
Otro punto desde luego tiene que ver con el tema que aquí estamos tratando es por supuesto el concepto de lo que es creatividad, que a simple vista es algo que no podemos explicar porque es resultado de un don especial pero que los estudios sobre IA han comenzado hacer posible dar explicación satisfactoria: nos dicen que en la medida que se logre escribir programas que exhiban propiedad, en esa misma medida se empezara a explicar la creatividad.
Otra propiedad que se espera ver asociada a la IA es la autoconciencia; que de acuerdo con los resultados de las investigaciones psicológicas hablan por una parte de que como es bien sabido, el pensamiento humano realiza gran cantidad de funciones que no se pueden calificar de conscientes y que por lo tanto la autoconciencia contribuye en cierto sentido a impedir el proceso mental eficiente; pero por otro lado es de gran importancia poder tener conocimiento sobre nuestras propias capacidades y limitaciones siendo esto de gran ayuda para el funcionamiento de la inteligencia tanto de la maquina como del ser humano.
Pero seria imposible tratar de contemplar el tema de la IA sin recurrir a la cuestión de la complejidad; donde el comportamiento inteligente es el resultado de la interacción de muchos elementos y que con seguridad es una de las más valiosas contribuciones al tratar de simular en la maquina los fenómenos intelectuales humanos.
La IA se ha desarrollado como disciplina a partir de la concepción de la inteligencia que se realizo al interior de la psicología y a partir de la cual se elaboraron diferentes categorías.
La inteligencia: Diferentes teorías y definiciones.
En 1904 el ministerio de instrucción publica de Francia pidió al psicólogo francés Alfred Binet y a un grupo de colegas suyos que desarrollan un modo de determinar cuales alumnos de la escuela primaria corrían el riesgo de fracasar para que estos alumnos reciban una atención compensatoria. De sus esfuerzos nacieron las primeras pruebas de inteligencia. Importadas a los EEUU varios años después las pruebas se difundieron ampliamente así como la idea de que existiera algo llamado " inteligencia" que podía medirse de manera objetiva y reducirse a un numero o puntaje llamado " coeficiente intelectual" desde entonces sé a definido la inteligencia en términos de "habilidad para resolver problemas".
I.INTELIGENCIAS MULTIPLES
Un psicólogo de Harvard llamado Howard Garden, señalo que nuestra cultura había definido la inteligencia de manera muy estrecha y propuso en su libro " estructura de la mente", la existencia de por lo menos siete inteligencias básicas:
Inteligencia lingüistico: capacidad de usar las palabras de modo efectivo ( ya sea hablando, escribiendo, etc). Incluye la habilidad de manipular la sintaxis o escritura del lenguaje, la fonética o los sonidos del lenguaje, la semántica o significado de lenguaje o división, pragmática o los husos prácticos.
Inteligencia lógico matemática: capacidad de usar los números de manera efectiva y de razonar adecuadamente ( pensamiento vertical).
Inteligencia espacial: la habilidad para percibir la manera exacta del mundo visual-espacial y de ejecutar transformaciones sobre esas percepciones ( decorador, artistas, etc).
Inteligencia corporal – kinética: la capacidad para usar el cuerpo para expresar ideas y sentimientos y facilidad en el uso de las propias manos para producir o transformar cosas.
Inteligencia musical: capacidad de percibir, discriminar, trasformar y expresar las formas musicales.
Inteligencia interpersonal: la capacidad de percibir y establecer distinciones entre los estados de ánimo, las intenciones, motivaciones, sentimientos, de otras personas.
Inteligencia intrapersonal: el conocimiento de sí mismo y la habilidad para adaptar las propias maneras de actuar a partir de ese conocimiento.
Más allá de la descripción de las inteligencias y de sus fundamentos teóricos hay ciertos aspectos que convienen destacar:
Cada persona posee varios tipos de inteligencias.
La mayoría de las personas pueden desarrollar cada inteligencia hasta un nivel adecuado de competencia.
Las inteligencias por lo general trabajan juntas de manera compleja, ósea, siempre interactúan entre sí para realizar la mayoría de las tareas se precisan todas las inteligencias aunque en niveles diferentes hay muchas maneras de ser inteligentes en cada categoría.
Inteligencia emocional: existe una dimensión de la inteligencia personal que esta ampliamente mencionada aunque poco explorada en las elaboraciones de Gadner: el papel de las emociones
Daniel Goleman; toma este desafío y comienza a trabajar sobre el desarrollo de Gadner llevando a un plano más pragmático y centrado en las emociones como foco de la inteligencia.